

Hydronic balancing & stabilisation of the differential pressures
The main objective of heating and air conditioning plant design is to obtain a comfortable indoor climate, at minimal energy costs and without operational problems.
Introduction
In theory, new control technologies can satisfy the most demanding requirements on indoor comfort and energy efficiency. In practice however, even the most sophisticated controllers do not always control efficiently. This is because the conditions required for successful operation are not met. As a result, both comfort and cost savings can be compromised. This is not acceptable.
These are common HVAC plant problems:
- The desired room temperature is not achieved in all rooms, especially after big load variation.
- When obtained, the required room temperature fluctuates even though sophisticated controllers are used on the terminal units. These variations usually occur at small and medium loads.
- Although production units have sufficient capacity, it cannot be transmitted at large loads and particularly during start-up.
These malfunctions cannot be corrected by installing even more sophisticated controllers. Often, the malfunctions occur because one of several of three fundamental conditions are not fulfilled:
- The design flow must be available at all terminals.
- The differential pressure across the control valves must not vary too much.
- Flows must be compatible at system interfaces
This article deals specifically with the second condition.
The control valve characteristic
The characteristic of a control valve is defined by the relation between the water flow through the valve and the valve lift at constant differential pressure. Water flow and valve lift are expressed as a percentage of their maximum values.
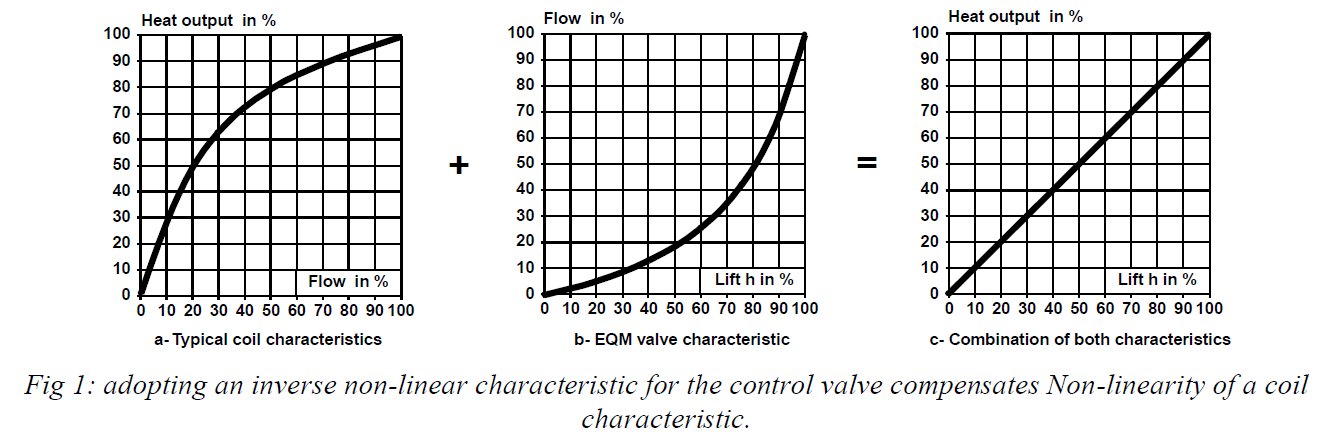

For a valve with linear characteristic, the water flow is proportional to the valve lift. Due to the non-linear characteristic of the terminal unit (Figure 1a), opening the control valve slightly can significantly increase the emission at small and medium loads. The control loop may therefore be unstable at small loads.
Choosing a control valve characteristic to compensate for the non-linearity can solve this problem. This helps ensure that emission from the terminal unit is proportional to the valve lift.
Let’s say that the output of the terminal unit is 50 percent of its design value when supplied by 20 percent of its design flow. The valve may then be designed to allow only 20 percent of the design flow when it is open 50 percent. When the valve is 50 percent, 50 percent of the heat output are obtained (Figure 1c). If this holds true for all flows, you can obtain a valve characteristic that compensates for the non-linearity of a typical controlled exchanger. This characteristic (Figure1b) is called equal percentage modified "EQM".
To obtain this compensation, two conditions must be fulfilled:
- The differential pressure across the control valve must be constant.
- The design flow must be obtained when the control valve is fully open.
If the differential pressure across the control valve is not constant, or if the valve is oversized, the control valve characteristic becomes distorted and the modulating control can be compromised.
The control valve authority
When the control valve closes, the flow and the pressure drop are reduced in terminal, pipes and accessories. The difference in pressure drop is applied to the control valve. This increase in the differential pressure distorts the control valve characteristic. The control valve authority can represent this distortion.


The numerator is constant and depends only on the choice of the control valve and the value of design flow. The denominator corresponds with the available differential pressure ΔH on the circuit. A balancing valve installed in series with the chosen control valve does not change any of these two factors and consequently does not affect the control valve authority.
The control valve is chosen to obtain the best possible authority. However, the control valve calculated is not available on the market. This is why most of the control valves are oversized. By using a balancing valve, the design flow may be obtained when the control valve is fully open. With the balancing valve, the characteristic obtained is closer to the required characteristic, improving the control function (Fig 3b).
Differential pressure changes with the average load in the plant.
In a direct return distribution (Fig 2a), the remote circuits experience the highest variations in differential pressure. At low flows, when the control valve is subjected to almost all the pump head, control valve authority is at its worst.
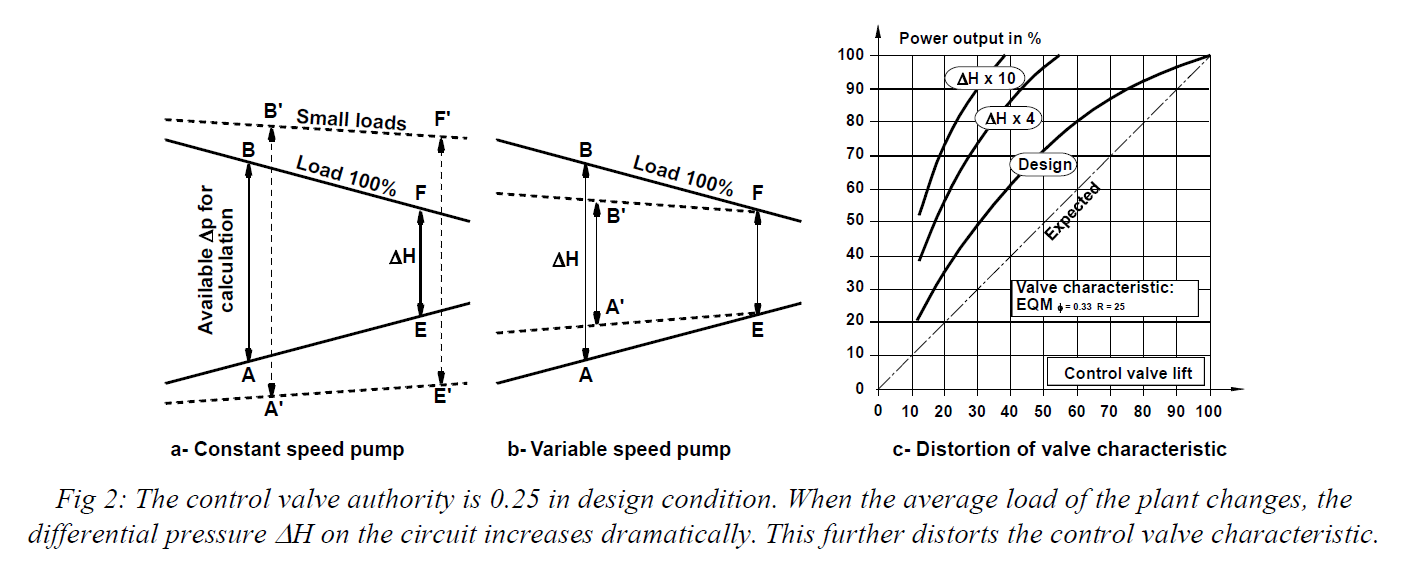
With a variable speed pump, it is common to keep the differential pressure constant close to the last circuit (Fig 2b). Then, the problem of varying ΔH is reported to the first circuit.
Locating the differential pressure sensor for the variable speed pump near the last circuit should, in theory, reduce pumping costs. This however causes problems for the circuits close to the pump. If the control valve has been selected according to the available ΔH in design condition, then the circuit will be in underflow for smaller ΔH. If the control valve has been selected based on the minimum ΔH, then, at design condition, the circuit will be in overflow and the control valve will have a bad authority. As a compromise, the differential pressure sensor should preferably be located at the middle of the plant. This can reduce differential pressure variations by more than 50 percent compared to those obtained with constant speed pump.
Figure 2c shows the relation between the heat output and the valve lift for EQM control valves selected to obtain the correct flow when fully open and a valve authority of 0.25. When the available differential pressure applied on the circuit increases, the control valve characteristic is distorted so much that it causes hunting of the control loop. In this case, a local differential pressure controller can be used to stabilise the differential pressure across the control valve and keep the valve authority close to 1 (Fig 4a).
Selection of modulating control valves
A two-way control valve is well sized when:
- The design flow is obtained for the control valve when fully open under design conditions.
- The control valve authority is and remains sufficient, that is, generally above 0.25.
The first condition is necessary to avoid an overflow, which creates underflows in other circuits, when the control valve is open and remains so for a relatively long period. This occurs (1) during start-up, such as each morning after a night set back, (2) when the coil has been undersized, (3) when the thermostat is set on minimum value in cooling, and (4) when the control loop is not stable.

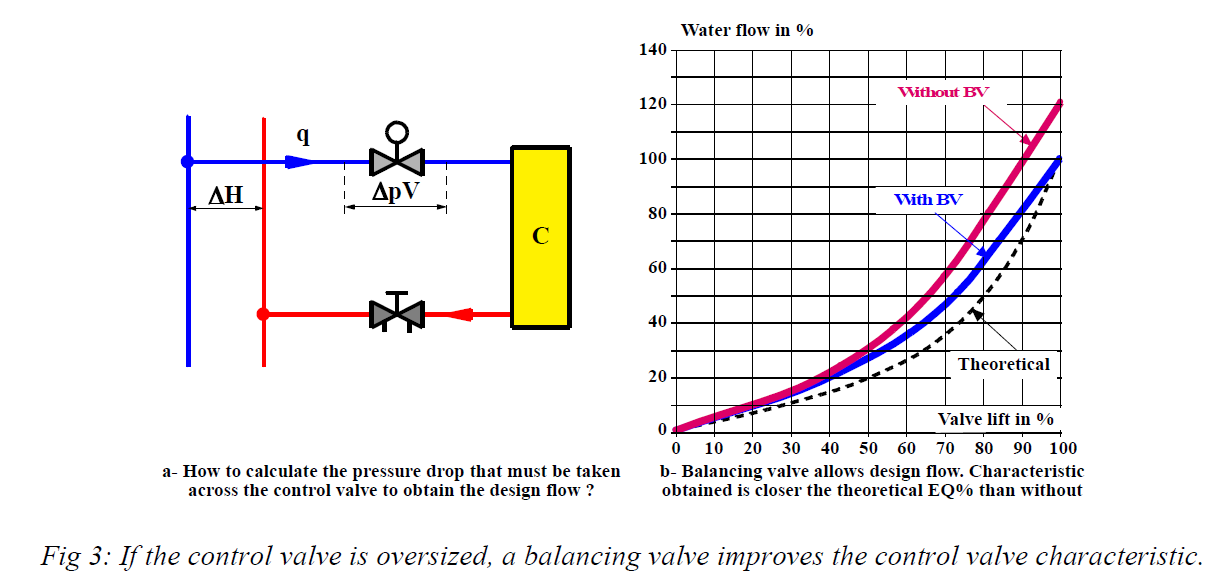
To obtain the design flow in design condition, the pressure drop in the control valve when fully open and at design flow, must be equal to the local available differential pressure ΔH, minus the design pressure drop in the coil and accessories (Fig 3a).
Now, assume that this information is available (!) before selecting the control valve. For a flow of 1.6 l/s, what is available on the market? One control valve that creates a pressure drop of 13 kPa, another that creates 30 kPa and a third that creates 70 kPa. If 45 kPa must be created in the fully open control valve, then such a valve is not available on the market. As a result, control valves are generally oversized. A balancing valve is then needed to obtain the design flow. The balancing valve improves the control valve characteristic without creating any unnecessary pressure (Fig 3b).
Once the control valve has been selected, we must verify if its authority ΔpVc / ΔHmax is sufficient. If it is insufficient, the plant design must be reconsidered to allow a higher pressure drop across a smaller control valve.
Some designs to solve local problems
Providing separate treatment for special cases usually results in better operating conditions than forcing the rest of the system to respond to abnormal conditions.
When control valve selection is critical or when the circuit is subjected to major changes in ΔH, a local differential pressure controller can stabilise the differential pressure across the control (Fig 4a). This is generally the case when the control valve authority can drop below 0.25.
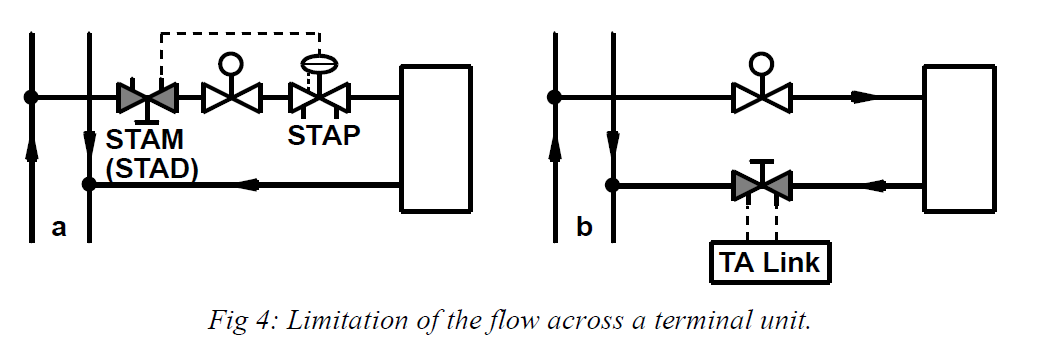
 The principle is simple. The membrane of the STAP differential pressure controller is connected on the inlet and the outlet of the temperature control valve. When the differential pressure increases, the force on the membrane increases and shuts STAP proportionally. STAP keeps the differential pressure on the control valve almost constant. This differential pressure is selected to obtain the design flow, measurable at STAM, when the control valve is fully opened. The control valve is never oversized and valve authority is close to 1.
The principle is simple. The membrane of the STAP differential pressure controller is connected on the inlet and the outlet of the temperature control valve. When the differential pressure increases, the force on the membrane increases and shuts STAP proportionally. STAP keeps the differential pressure on the control valve almost constant. This differential pressure is selected to obtain the design flow, measurable at STAM, when the control valve is fully opened. The control valve is never oversized and valve authority is close to 1.
All additional differential pressure is applied to STAP. The control of the differential pressure is quite easy in comparison with a temperature control and a sufficient proportional band can be used to avoid hunting.
Combining local differential pressure controllers with a variable speed pump ensures the best conditions for control. The comfort is improved with substantial energy savings. The risk of noise is reduced considerably. For economic reasons, this solution is normally reserved for small units (pipe size lower than 65 mm).
For larger units, for which the differential pressure varies widely, the maximum Kvs can be limited by using a differential pressure sensor connected to a balancing valve (Fig 4b). When the differential pressure measured corresponds to the design flow, the control valve is not permitted to open furthermore.
If the plant has been calculated with a diversity factor, the maximum flow allowed is reduced during start up to obtain a homogeneous flow distribution. The set point of the maximum flow can also be changed according to the requirements of priority circuits.
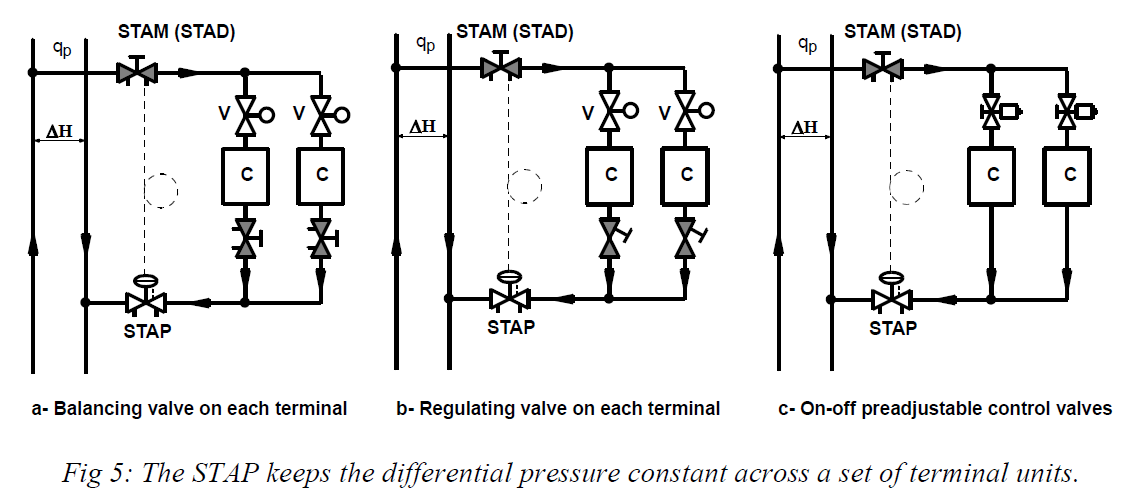
When terminal units are controlled with on-off or time proportional control valves, limitation of the differential pressure can help reduce noise and simplify balancing. In this case, a differential pressure controller keeps the differential pressure constant across a set of terminal units (Fig 5).
This solution also works for a set of small units controlled by modulating control valves.

These examples are not restrictive, they just show that some particular problems can be solved by using specific solutions.
Keeping the differential pressure constant in heating plants
Variable flow distribution
In a radiator heating plant, the radiator valves are generally preset considering that the available differential pressure ΔHo equals 10 kPa.

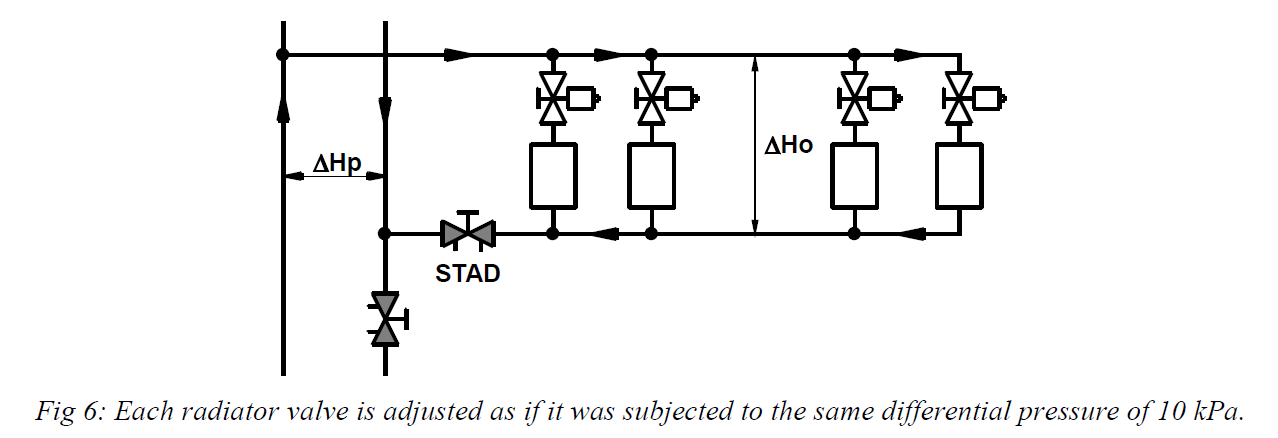
During the balancing procedure, the STAD balancing valve is set to obtain the right total flow in the branch. This justifies the presetting and the 10 kPa differential pressure expected is obtained at the centre of the branch.
In radiator systems with available differential pressure over 30 kPa, there is a risk of noise in the plant, especially when air remains in the water. In this case, you should use STAP to reduce the differential pressure and to keep it constant (Fig 7).
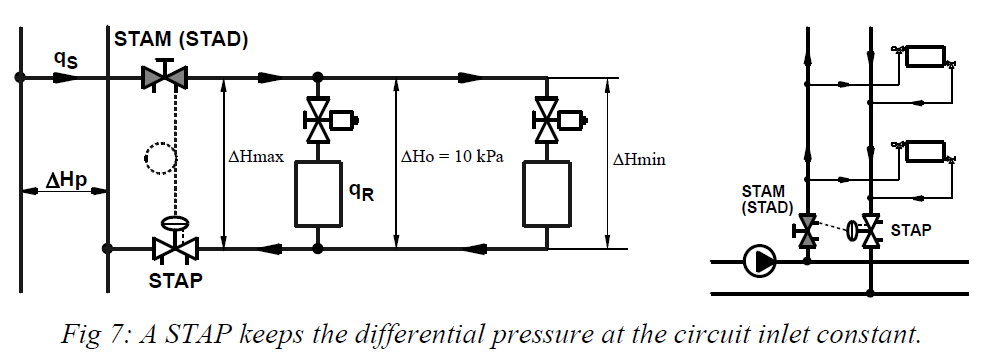

STAP keeps the differential pressure constant on each branch or small riser. The branch water flow (qs) is measured with the STAM (STAD) measuring valve. This combination relieves the thermostatic valves of excess differential pressure.
Constant flow distribution
The supply water temperature, in a residential building, is adjusted with a central controller according to the outdoor conditions.
The pump head may be high, which can cause noise in the thermostatic valves. If there is no restriction on the return water temperature, a constant flow distribution may be used.
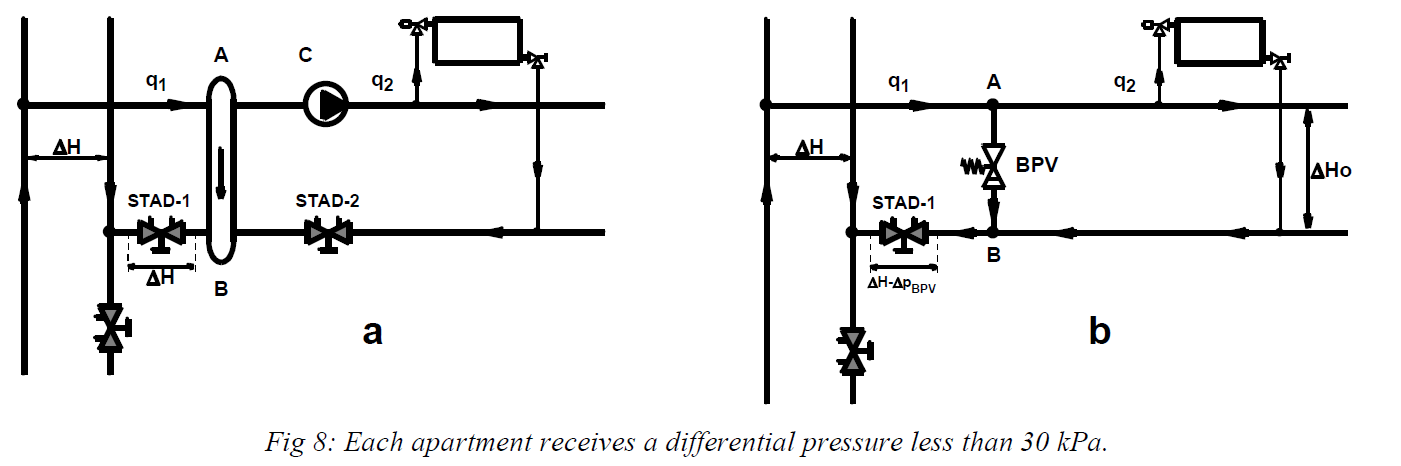

One solution is to provide each apartment with a bypass line AB and a balancing valve STAD-1 (figure 8a). This balancing valve takes away the available ΔH. A secondary pump with a pump head less than 30 kPa, serves the apartment. When the thermostatic valves close, the Δp across the thermostatic valves is acceptable and does not create noise in the plant. The secondary design flow must be slightly lower than that of the primary flow to avoid a reverse flow in the bypass, which would create a mixing point at A and decrease the supply water temperature. This is why another balancing valve STAD-2 on the secondary is necessary.
Another solution is to install BPV, a proportional relief valve, for each apartment (Fig 8b). This eliminates the need for a secondary pump and for the balancing valve STAD-2. BPV works with one STAD balancing valve STAD-1 to stabilise the secondary differential pressure. The BPV is set to suit the requirement of the radiator circuit. When the thermostatic valves close, the differential pressure between A and B increases beyond the set point. The BPV then opens and bypasses a supplementary flow creating a sufficient pressure drop in the balancing valve to keep almost constant the differential pressure between A and B.
Let us suppose that the balancing valve STAD-1 is not installed. If the primary differential pressure ΔH increases, BPV will open, increasing the primary flow q1. The resistance of the pipes between AB and the riser being negligible, the differential pressure across AB remains equal to ΔH. Consequently, to stabilise the secondary differential pressure, the BPV must be coupled with a balancing valve STAD-1 that creates a sufficient pressure drop.
General design recommendations
The design of a hydronic plant depends on its characteristics and working conditions. However, for any variable flow distribution system with direct or reverse return, constant or variable speed pump, modulating or on-off control, the following recommendations are relevant:
1. Balance the plant hydraulically in design condition. This ensures that the installed capacity can be delivered. There is no difference if modulating or on-off mode has been selected for control of the terminal units.
2. Use either the Compensated method or the TA Balance computer program for balancing of the plant. This avoids any scanning of the plant and significantly reduces labour costs. These two methods reveal pump oversizing and makes it possible to reduce pumping costs. The balancing helps detect most hydronic problems. Manual balancing valves allow you to measure flows for diagnostic purposes.
3. Select modulating two-way control valves carefully based on:
a) Correct characteristic (normally EQ% or EQM).
b) Correct size: the control, when fully open and at design flow, must take at least 50% of the available circuit differential pressure under design conditions.
c) The control valve authority should not drop below 0.25.
4. If the last condition 3c cannot be fulfilled for some circuits, a local differential pressure controller is installed in these circuits to improve the control valve authority and decrease the risk of noise.
5. When using a variable speed pump, locate the differential pressure sensor to achieve the best compromise between the desire to minimise pumping costs and the imperative to reduce the differential pressure variations across the control valves. A computer simulation may determine the optimal location for the sensor.
Conclusion
A HVAC system is designed for a specific maximum load. If the plant cannot deliver full capacity in all circuits because it is not balanced for design condition, then the investments for the entire plant are not realised.
Control valves are fully open when maximum capacity is required and thus cannot manage this situation. Furthermore, control valves are generally oversized and they cannot contribute to balancing. Hydronic balancing is then essential and represents typically less than one percent of the total HVAC system.
Each morning, after a night set back, full power is required to recover the comfort as soon as possible. A well-balanced plant does this quickly. If a plant starts up 30 minutes quicker, this saves 6 percent of the energy consumption per day. This is often more than all distribution pumping costs.
In a variable flow distribution, pumping costs are generally less than 5% of the seasonal consumption of the chillers. Compare this with the cost of 10 to 16% for one degree a too low temperature in the rooms. Obtaining the correct comfort is then the best way to save energy. However, any actions to reduce pumping consumption must be taken so they do not adversely affect the operation of terminal unit control loops.
There are several ways to reduce pumping costs. One method is, whenever possible, to increase the design water rise or drop. Another is to use of variable speed pumps with optimal location for the differential pressure sensor. Introducing stable modulating PI controls that require lower flows (Fig 1a) at medium loads instead of on-off controls is a third option.
But the most important consideration is to compensate for pump oversizing. Balancing valves adjusted with the compensated method reveal the degree of pump oversizing. All the overpressure is shown on the balancing valve closest to the pump. Corrective action is then taken and this balancing valve is then reopened.
Hydronic balancing requires the correct tools, up to date procedures and efficient measuring units. A manual balancing valve is the most reliable and simple product to obtain the correct flows in design conditions. It also allows the flows to be measured for diagnostic. They can be associated with differential pressure controllers when necessary.
Reference Total Hydronic balancing - R. Petitjean
Edition TA HYDRONICS - 530 pages - 1997.